
Last year, Dana Yoerger presented at the Wyss about the next ocean-exploring robot Woods Hole Oceanographic Institute (WHOI) planned to make. Dana introduced us to the Mesobot, an AUV that would help scientists investigate everything from how mid-oceanic life migrates up and down the water column to exploring how tiny tunicates filter-feed in the deep ocean. It would have state-of-the-art cameras and lights to be able to follow and record animals of interest as they move, and it would be able to take and store samples. The Mesobot design is biomimetic and its ability to maneuver is based on jellyfish and salps, for the most part (which explains why I was in the audience and one of maybe five women attending, per usual).
During his talk, though, Dana went into the history of ROVs and AUVs used at MBARI (Monterey Bay Aquarium Research Institute) and WHOI, and I had no idea what cool robots scientists were employing to investigate our oceans. Even though Dana’s talking style left much to be desired, I was captivated the entire time simply because of the material. That doesn’t happen very often for me and so I was inspired to write this blog from that.
HOV, ROV, AUV – What’s the difference?
Before I go into all the super-cool bots and what they do, I should probably take a minute to go into the different categories of underwater vehicles.
First, we have submarines and submersibles. The main difference between these two is that a submarine is generally a completely autonomous vehicle. It is not receiving any support (e.g. power, air supply) from a nearby ship. A submersible, on the other hand, does generally have a cable connecting it to a ship. Because this difference is rather slight, the terms are used interchangeably. The main feature of both of these vessels, however, is that a human is enclosed within the vessel itself. This makes both submersibles and submarines Human Occupied Vehicles, or ‘HOV’s.

‘ROV’ stands for Remotely Operated Vehicle. Unlike a submersible, a ROV doesn’t have a person controlling it from within. Located most likely on a ship, the controller is connected through cables to ROV, dictating commands to it remotely.

And lastly, an ‘AUV’ is an Autonomous Underwater Vehicle. (If you’re wondering why HOV and ROV aren’t HOUV and ROUV, it’s because underwater is generally understood. It’s included in AUV because they wanted to keep the 3-letter acronyms rolling, I guess.) From my understanding, there’s a bit of a scale involved with AUVs – they can be more or less autonomous. With some AUVs, like Sentry, the scientists can communicate with it while it’s working; with others, the scientists might have to wait until they retrieve the machine to know whether they collected the data they wanted.

Because I haven’t thrown enough acronyms at you yet, let’s add another: both ROVs and AUVs can be sub-categorized as UUVs: Unmanned Underwater/Undersea Vehicles. However, the acronym UUV is more regularly used by the military, or so Wikipedia informs me, and the scientific community doesn’t really bother with it. Everything from here on out will either be an AUV or an ROV, just to keep things nice and tidy.
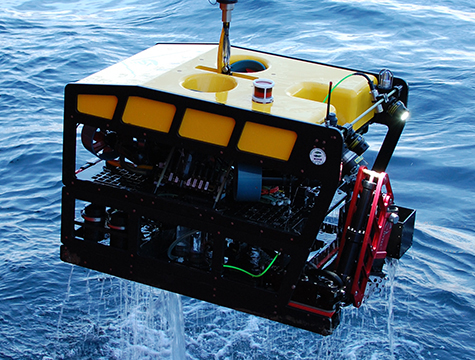
ROV Jason
 Meet Jason. Jason is an ROV designed by WHOI, and it is actually part of a two-body system.
Meet Jason. Jason is an ROV designed by WHOI, and it is actually part of a two-body system.

Because Jason is tethered to the surface vessel by cables, if the surface vessel is experiencing rough-enough seas, Jason could be jerked around at the end of the cable. To address this problem, WHOI made a nanny, Medea. Jason and Medea are connected through a 55m cable, and it is Medea’s job to act as a buffer for surface turbulence. She also has extra lights on board that can be used to provide extra illumination for Jason’s cameras. Medea also has three cameras that allow scientists to monitor the cables, control motion, and of course, help keep an eye on Jason.
Now for the cool part: Jason was built to operate at 6500m below the surface. The average ocean depth is 4033m, and Challenger Deep, the deepest section of Mariana’s Trench, is 12,000m down. Jason can reach 99% of the ocean’s floor and scientists use it primarily for deep-ocean missions because of this fact. In 2009, WHOI used Jason to film an underwater volcanic eruption 4,000ft/1200m beneath the surface of the Pacific Ocean.
Here’s a link to the full video. In 2014, UW professors used Jason and Medea to identify two new hydrothermal vents in the Pacific Ocean, which were then named in honor of the ROVs.
Also in 2014, Jason received a $2.4 million upgrade from the NSF, which increased its carrying capacity from 400 lbs of samples to 2 tons. The upgrade also retired Medea – no more babysitter. The primary motivation behind this upgrade was to streamline Jason, reduce the complexity (99 problems and Medea was most of them, you know?), and to increase its ability to perform maintenance on sea-floor infrastructure. This is the first major upgrade since the second-generation Jason was launched in 2002.
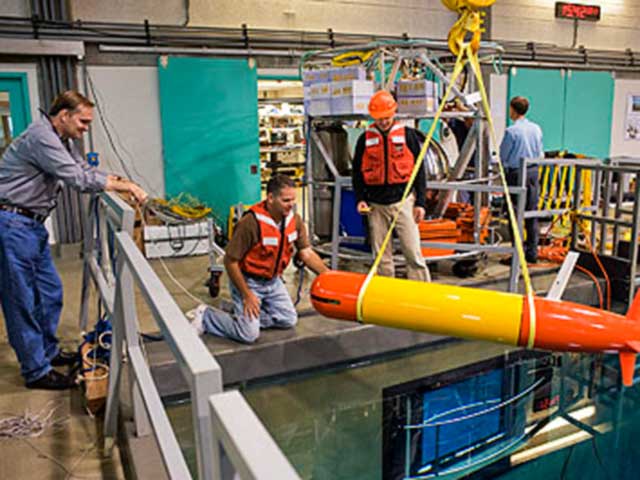
AUV Sentry

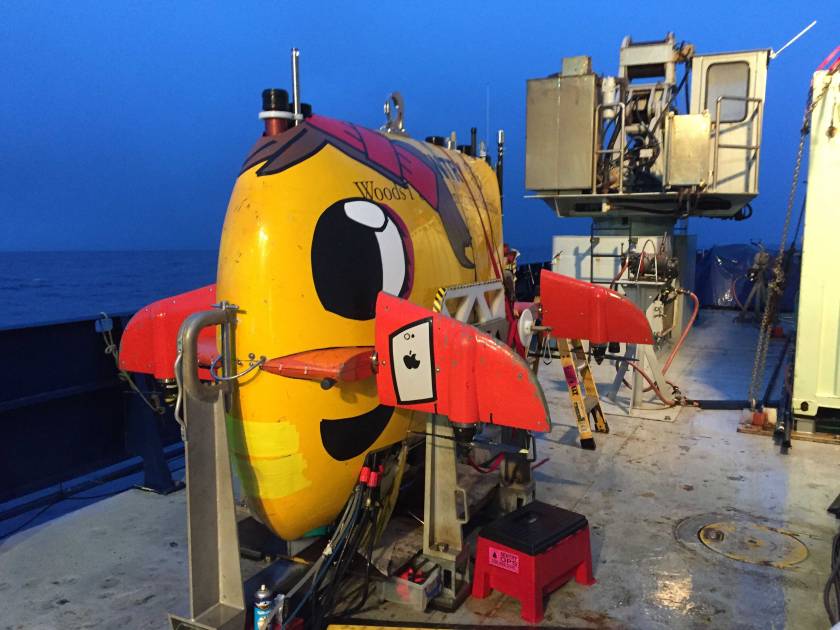
Sentry is an AUV owned and operated by WHOI. First developed in 2010, Sentry can dive down to 6000m (although different sources vary between 4500m and 6000m). Its unusual shape, a torpedo stretched along it’s vertical axis, gives Sentry some extra stability when navigating bottom currents. Thrusters built into the wings also make Sentry exceedingly maneuverable compared to other torpedo-esque AUVs, which can only move in one direction.
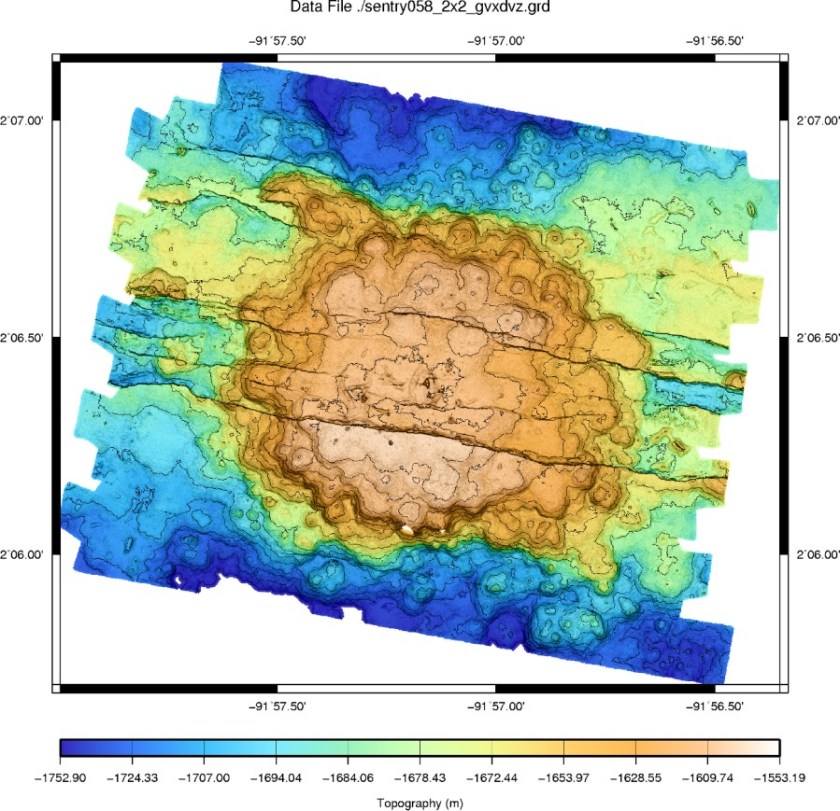
Sentry’s primary purpose in life is to make maps. That’s right. WHOI spent millions of dollars creating and operating a cartographer for the ocean’s floor. Kinda cool. Sentry has sonar to map out the seafloor to a 1-cm resolution, but it also takes high-resolution digital photographs every 30 seconds. Sentry also has sensors that can detect temperature, salinity, and chemical trails, thus allowing it to make high-quality bathymetric, topographic, chemical, and magnetic maps. Additionally, because scientists can communicate with Sentry while it’s working, they can redirect Sentry to take a closer look if it detects some weird temperature/chemical stuff while it’s mapping. Dana Yoerger said that Sentry is like a bloodhound: “When they find something we’re interested in, they can ‘bark’ and then return from the ‘hunt.’ ”
The ability to take photos as it goes is actually incredibly useful. For example, in 2016 Sentry was mapping the Santa Barbara Basin and the scientists were able to identify a mile-long bacterial mat from the color of the floor. ““It was like a blanket of snow draped over the otherwise darkened sea floor, but present only within a narrow depth interval,” according to the lead scientist on the project.
Despite how incredibly useful Sentry is to mapping the bottom of the ocean, the best thing about Sentry, in my opinion, is its many faces.






Here’s a video explaining more about Sentry, if you want to learn more.
ROV Doc Ricketts
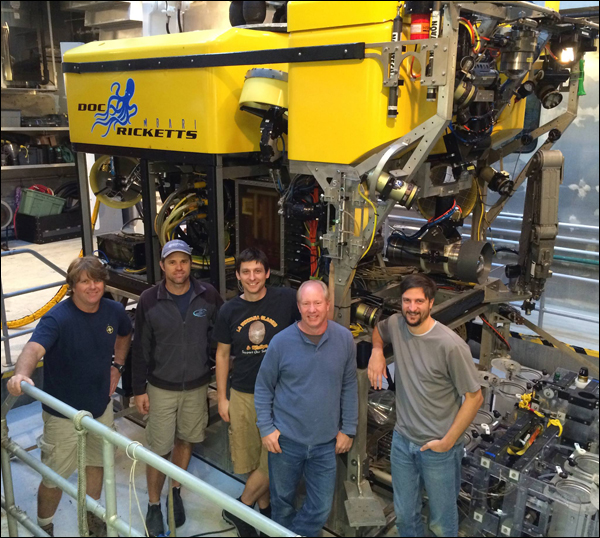
Unlike the previous two bots, MBARI’s Doc can only go down to 4000 meters. However, that was more than deep enough to explore the Pescadero Basin (3800m down) in the Gulf of California in 2015. After using a torpedo-shaped mapping AUV to map the basin, the scientists took the Doc down to get a closer look at a field sporting tall towers surrounded by areas of hot water. And just as they expected, the Doc found a quarter mile of active and collapsed hydrothermal vents on a fault line. The vents themselves are different from a lot of other known hydrothermal vents, meaning that the Doc has logged a lot of hours exploring the Basin. Here’s another cool video.
Additionally, the Doc has also been instrumental in studying larvaceans in Monterrey Bay. Larvaceans are wicked cool.
See that little wiggly tadpole-like thing in the middle? That’s a larvacean. They are also called appendicularians. The overall creature is exactly what you see in the middle: the round head attached to the undulating tail. All that stuff around it is its house. Which is made of mucous. They are deep-sea creatures and it’s been very hard to study them and their houses because when they get pulled up, the houses and often the larvacean themselves are destroyed by the pressure change and whatever else is coming up with them.
Here’s what we know: They are a type of tunicate and they use their house to be champs at filter-feeding. The houses are discarded and replaced pretty quickly–somewhere between 4 hours for one species and a day or two for others. The smaller species are absolutely abundant in the oceans, but the larger species are more elusive. The species in the gif was observed for the first time back in the 1899, but it wasn’t until the Doc went down in 2016 that scientists stumbled across the 3.9in larvacean and was able to successfully capture it and bring it back for study.
In 2016, the Doc was used to conduct in situ experiments with the larvaceans to better understand their feeding behavior. They found that microplastic particles deposited in the ocean from pollution are actually eaten–other filter feeders generally eat smaller, finer elements. However, the larvaceans are such quick and efficient filter feeders that they’ll eat anything, including the microplastic particles. Then, whatever eats the larvaceans also eats the plastic, and thus begins the cycle.
ROV MiniROV
Unlike the Doc, which measures 6′ x 12′ x 7′, MBARI’s MiniROV is only 4′ x 3′ x 2′. The MiniROV is also quieter than other ROVs, meaning that it can get closer to animals without scaring them off. Both the Doc and the MiniROV have been used to deploy another super cool technology: DeepPIV.
PIV, or particle image velocimetry, is a technique used to study how fluid moves in and around objects. (Video Source).
Neutrally buoyant particles are added to the water and then illuminated via a laser plane. All the particles within that plane are visible to the high-speed camera(s). Then that footage is sent through some incredibly expensive and highly propriety PIV software and you get something that looks like this (source):
Pretty awesome, right? So, it’s actually kinda hard to use PIV outside of a lab environment. First, you’re generally using some insanely expensive cameras that are incredibly fragile and not waterproof. Then to actually get any useful data from the PIV, you need your animal to swim just right in the laser plane, and this is even harder if you’re trying to image an animal in two orthogonal laser planes. (This is what I went down to Antarctica for: setting up the first ‘field’ PIV stuff at Palmer Station–take our equipment to the animals, not the other way around.)
But those crazy scientists at MBARI were like, ‘Let’s make a PIV setup on an ROV that’s going 1500m down in the water column. WCGW?’ Well, so far, not a lot has gone wrong and they’ve used DeepPIV to study those wicked cool larvaceans.
AUV Tethys
The last one I want to include in today’s all-star list is the Tethys. As I mentioned earlier, a lot of AUVs have this type of torpedo shape, and the sole propeller on the back means it has limited maneuverability compared to the Sentry. However, this doesn’t stop the Tethys from making cool discoveries.
The Tethys is considered a long-ranged AUV (LRAUV) and it is capable of covering massive areas. The original demonstration showed it could move at 1m/s for 1800km, and the scientists think it is capable of covering twice that. It also has a complete suite of sensors to track temperature, chemicals, etc.
Up until now, all the bots have been ocean-dwellers. The Tethys is the first one to work in fresh water, having recently taken on the mission of mapping the ecosystem of Lake Michigan. The scientists wanted to gather data to better understand the planktonic food webs, which is needed to better manage the ecosystem and prepare for climate-related changes.
Lastly, in January 2017 NASA tested the Tethys, along with some other bots, for missions to study oceans on some of Jupiter’s moons, like Europa. Because Tethys is capable of working for extended periods of time (a few weeks or more), NASA is trying to outfit a Tethys model with AI so that it is capable of performing experiments and researching areas with no or limited input from Earth. The AI software would identify points of interest based on an ocean modeling software output and then determine the optimal sampling strategy for a heterogeneous array of autonomous vehicles.
This is a rather short list, and I focus exclusively on MBARI and WHOI bots. There are a lot of other awesome AUVs and ROVs currently working around the globe to map and discover the mysteries of the ocean. I would definitely encourage you to read more about them and how they’re being used. I also included the full articles and sources I used to write this blog down below.
Cheers!
Z
P.S. – I really enjoyed writing this blog. I started it back in the spring and was finally inspired to finish it. Once I got going again, I actually had trouble stopping to do real work. Hopefully ya’ll found this as interesting as I do. And if there’s anything you guys want me to write about, I’m happy to take suggestions.
Resources:
Jason
ROV Jason/Medea – WHOI
Jason Fact Sheet – WHOI National Deep Submergence Facility
Go Down Jason, Let My Mooring Go – WHOI, the story of Jason rescuing a scientific mooring
UW Scientists Discovery Hydrothermal Vents on Deep Ocean Voyage – UW Navigation
Newly Upgraded ROV Jason : Bigger and Better – WHOI
Sentry
Exploring Carolina Canyons: AUV, Sentry – NOAA Ocean Explorer
A New Deep-Sea Robot Called Sentry – oceanus magazine
The many gifts of AUV Sentry – Schmidt Ocean Institute
AUV Sentry – WHOI
AUV System Spec Sheet: Sentry – AUVAC
Deep Sea Bacterial Takeover – The UC Santa Barbara Current
Doc Ricketts
Researchers discover deepest high-temperature hydrothermal vents in Pacific Ocean – Phys.org
MBARI collaborates with 3D at Depth on Next Generation High Resolution Bathymetry System – Yahoo Finance
‘Mythical’ sea blob finally spotted a century after its discovery – LiveScience
Larvaceans provide a pathway for transporting microplastics into deep sea food webs – Phys.org
MiniROV
MBARI MiniROV System Specs – MBARI
DeepPIV – DLPF powerpoint presentation
Tethys
AUV Mission in the Great Lakes – Marine Technology News
NASA developing AI for future exploration of extraterrestrial subsurface oceans – Spaceflight Insider

One comment